Raspberry Piをいじっていると作りたくなるのが、ラジコンカー。今回、WebIOPiを使ってスマホから操作するラジコンカーを製作したので、記事にします。
ゆくゆくはライントレースカー、カメラを使った自動運転カーを作っていきたいですが、今回はスマホを使って手動で操作するところまでを目標にします。
準備したもの
- Raspberry Pi Zero WH
- ヴィストン ビュートローバーH8 (車体、センサのみ使用)
- モータードライバ TA7291P ×2
- モバイルバッテリー maxell MPC-M5200
- Raspberry Pi Zero用ユニバーサル基板
- XH型端子 コネクタ
- 六角スペーサー
- Raspberry Pi固定用ブラケット(自作)
- スマートフォン
ヴィストン ビュートローバーは以前H8マイコン学習用に購入しました。しかし、購入したっきりになっていましたので、今回この車体を流用します。
ビュートローバーをRspberry Pi仕様にすると、Raspberry Piの電源に問題が生じます。H8マイコンボードは単三電池2本の3Vでも動作する仕様でした。しかし、Raspberry Piは5V必要です。
対策としては、Raspberry Pi駆動用にモバイルバッテリーを載せることにしました。軽量タイプではなく、手持ちのモバイルバッテリーを使用したので、重さは130gも増加してしまいました。
ラジコンカーの仕様
| 重さ | 400g |
| 全長×幅×高さ | 130mm×110mm×100mm |
| 駆動方式 | 2輪駆動 (左右独立) |
| トレッド | 100mm |
| タイヤ半径 | 21mm |
| モーター電源 | 3V (単3電池 ×2) |
市販のビュートローバーが200gに対し、Raspberry Pi仕様は400gと2倍になってしまいました…。
モータ制御回路の製作
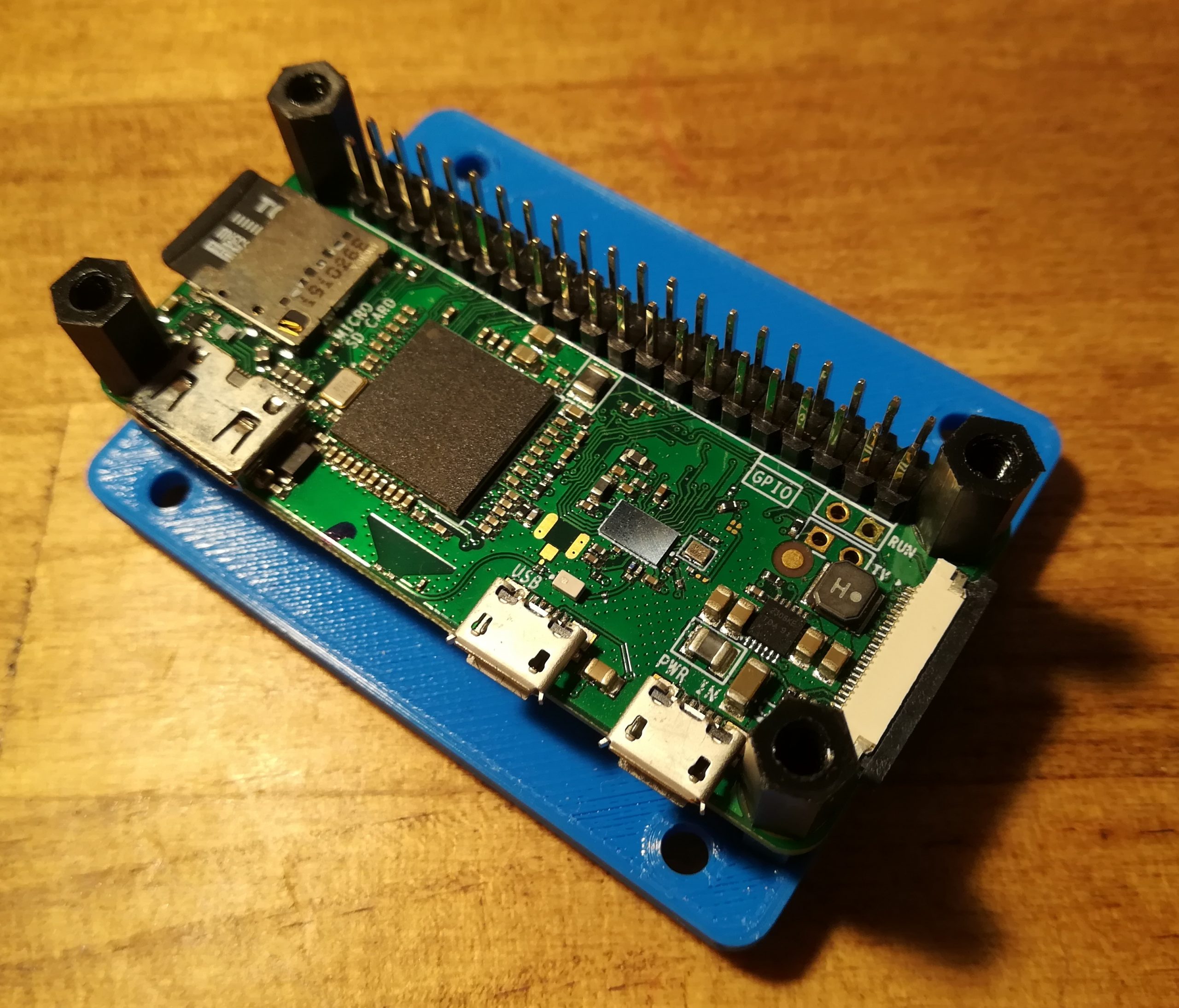
モータドライバはRaspberry Pi Zero用ユニバーサル基板に実装し、Raspberry Pi Zeroと2段構成としました。後にA/DコンバータMCP3208でアナログセンサ値をRaspberry Piに入力する計画のため、16PinのICソケットも実装しています。
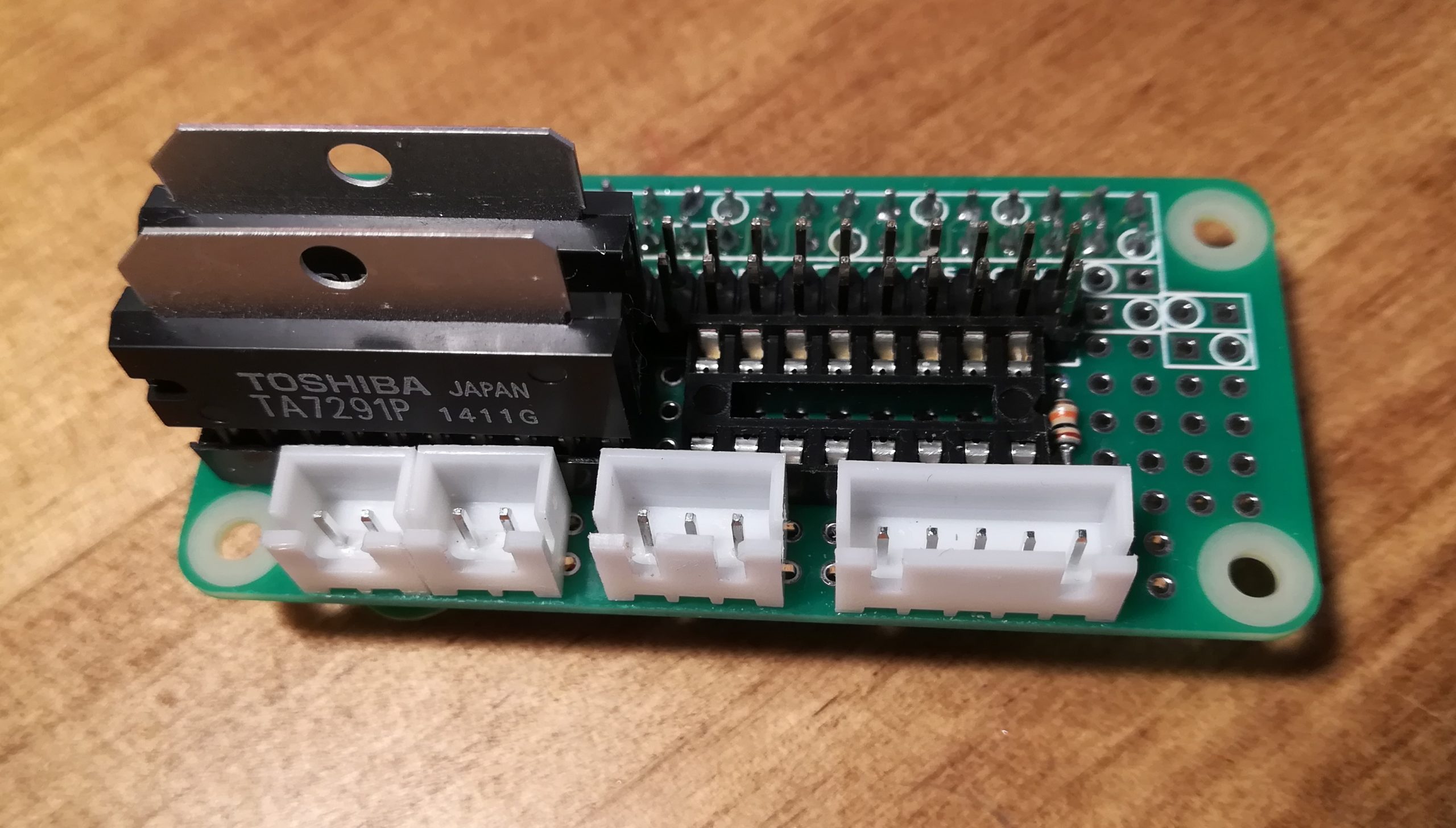
モータドライバには、TA7291Pを使用しました。TA7291Pは生産停止となってしまいましたが、以前購入したのが余っていたので使用しています。
回路図は下図の通りです。素人のため、ブレッドボード図で勘弁して下さい。
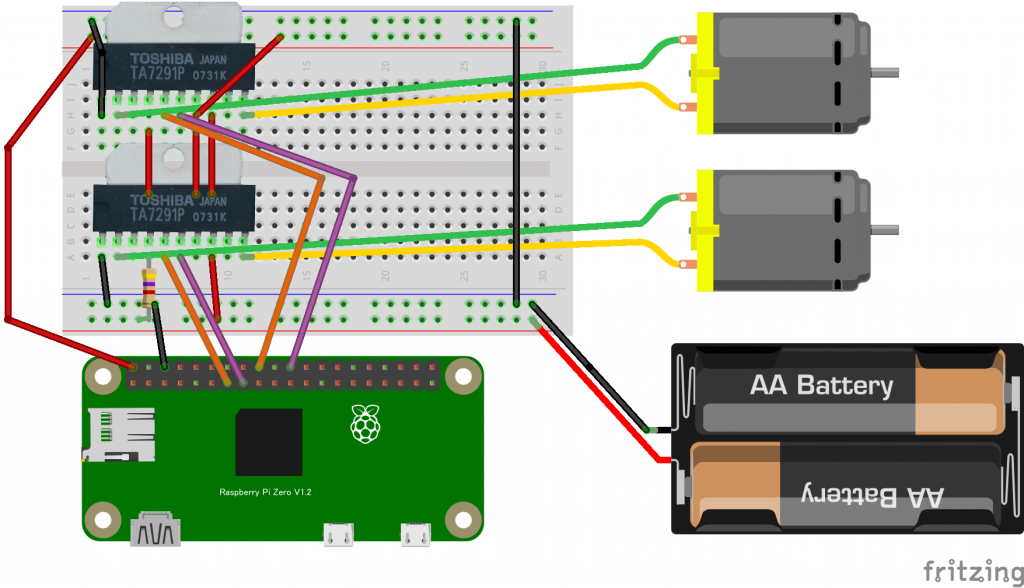
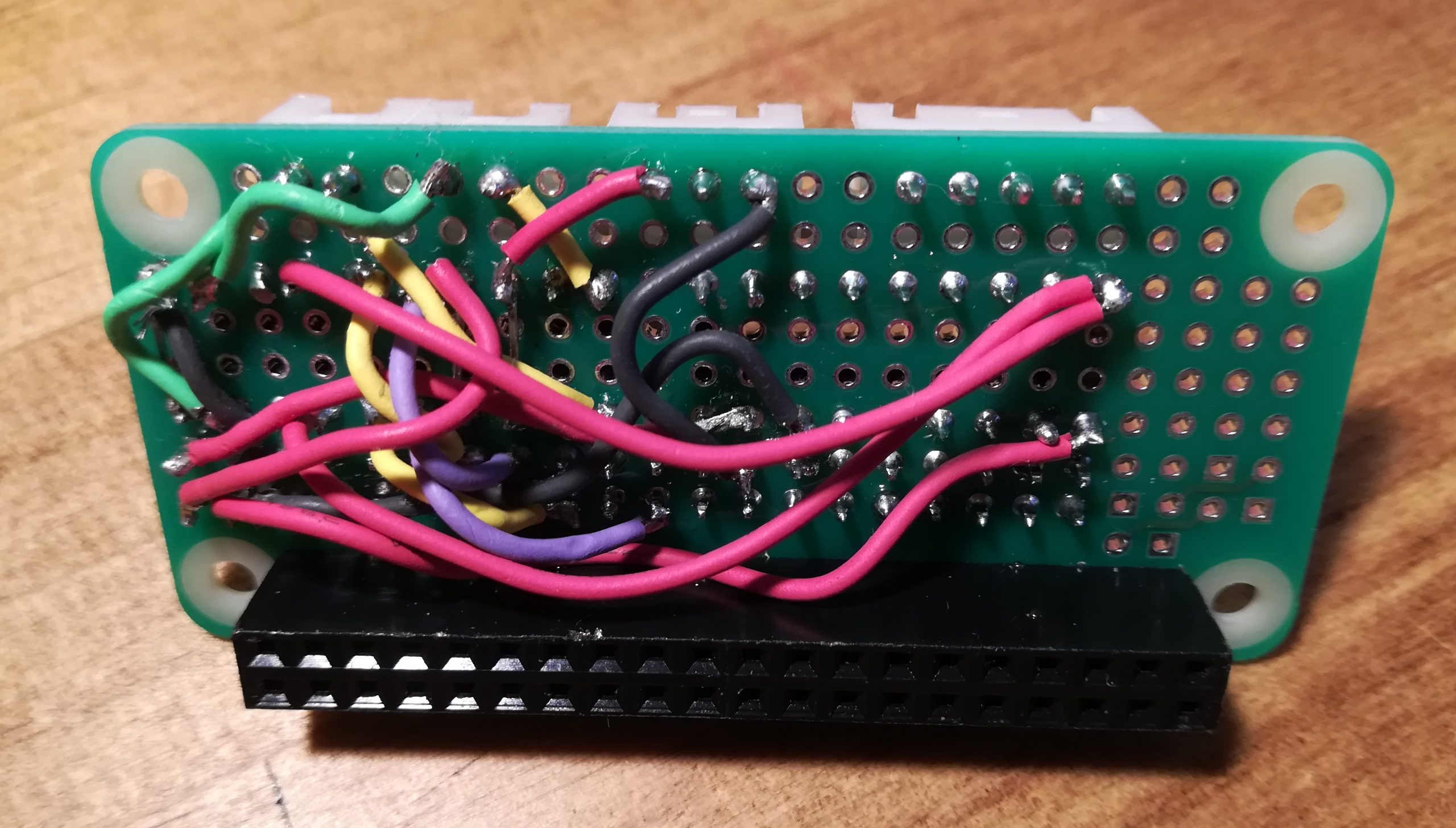
裏側配線はひどいものですが、導通チェックして問題ないことを確認しています。
車体の製作
ビュートローバーは、H8マイコンボードが搭載出来るようにねじ穴が配置されています。RaspberryPiZeroとねじ穴は一致しないので、3Dプリンタでブラケットを作成しました。
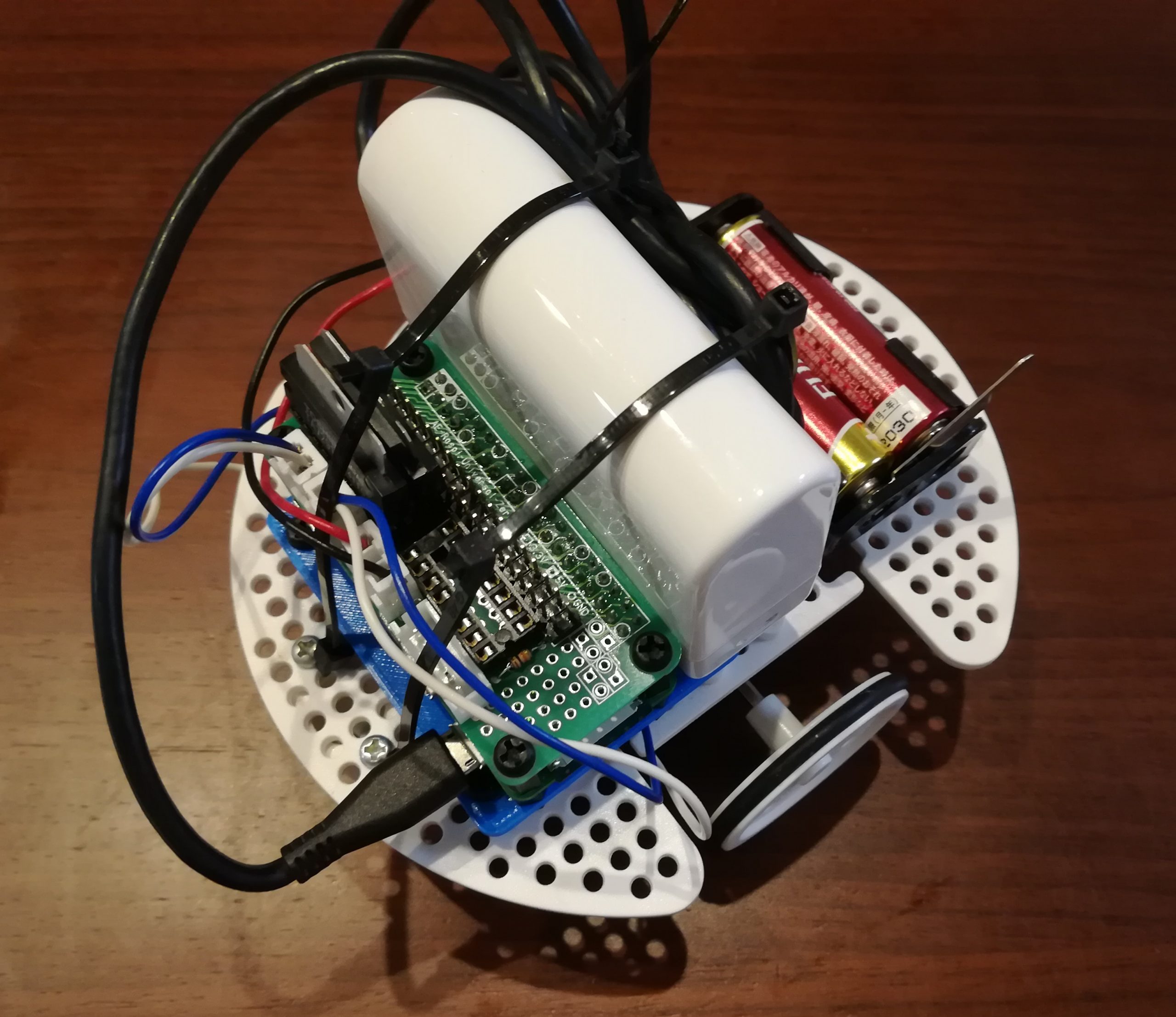
ビュートローバーの車体に搭載した写真です。
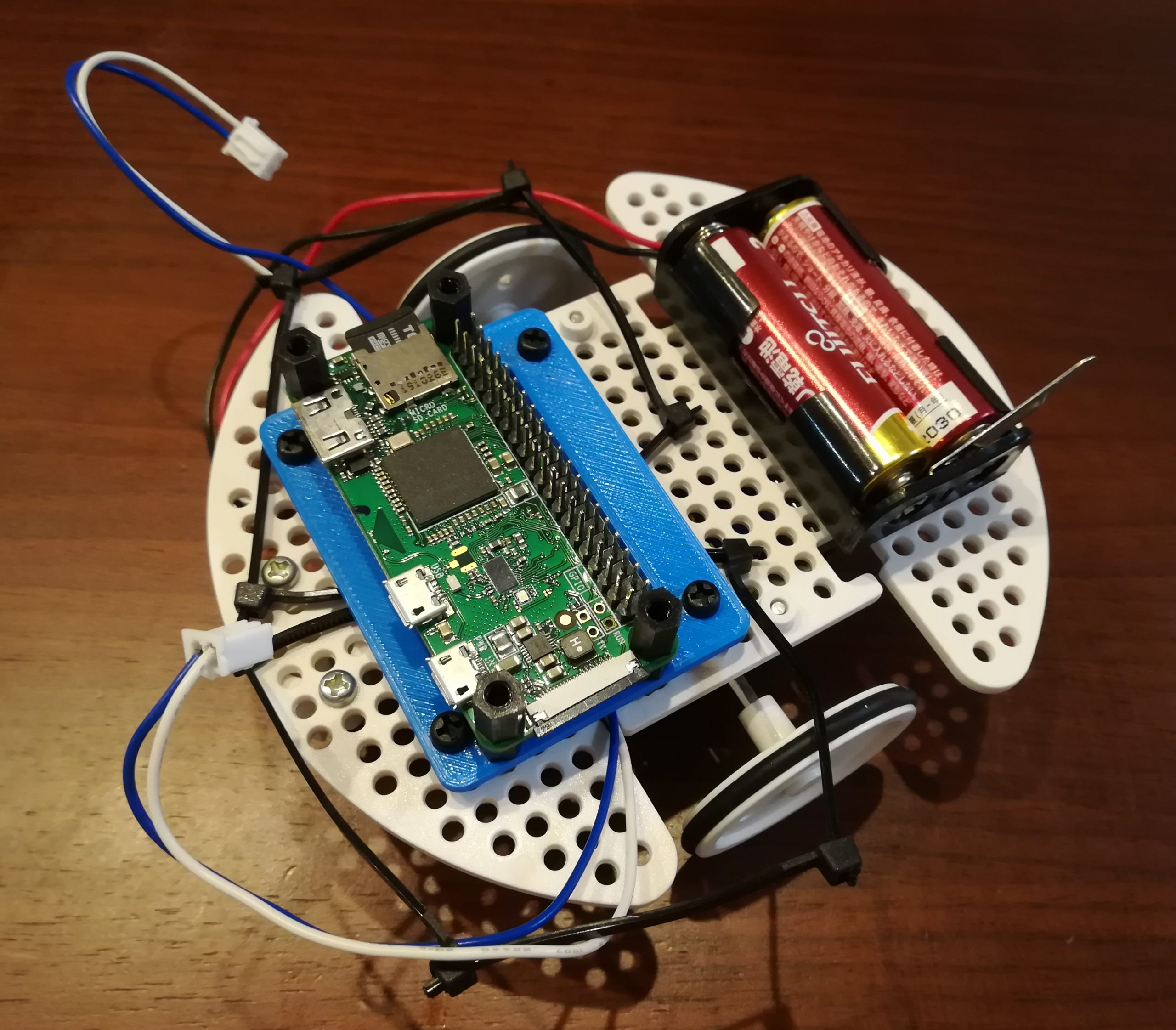
モータドライバ回路をRaspberry Pi Zeroの上に積み、モバイルバッテリーを車体中央に搭載しました。
まとめ
スマホで動くラジコンカー製作「車体編」として、ヴィストン ビュートローバーを改造したRaspberry Pi仕様のラジコンカーを製作しました。
改造したことは
- モータドライバ TA7291PとRaspberry Pi Zero用ユニバーサル基板を使用してモータ制御回路を製作
- 自作のブラケットを介し、Raspberry Pi Zeroをビュートローバー車体に搭載
- モバイルバッテリーを搭載し、Raspberry Pi Zeroを駆動
次回記事では、「ソフトウェア編」としてWebIOPiを使ったモータ制御について解説していきたいと思います。