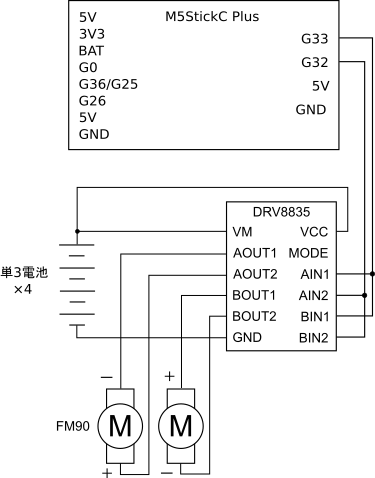
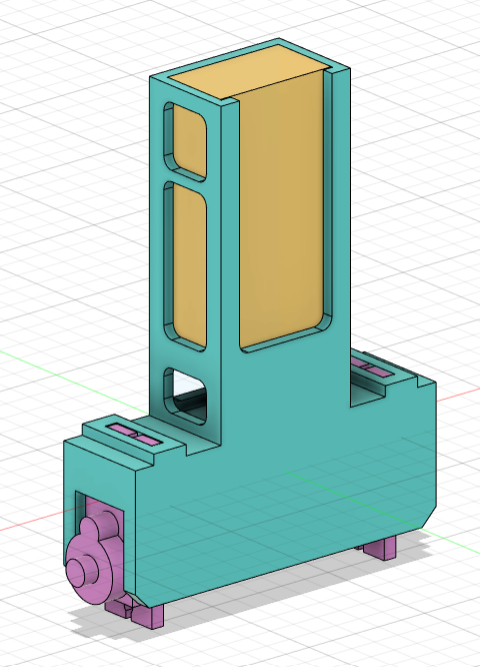
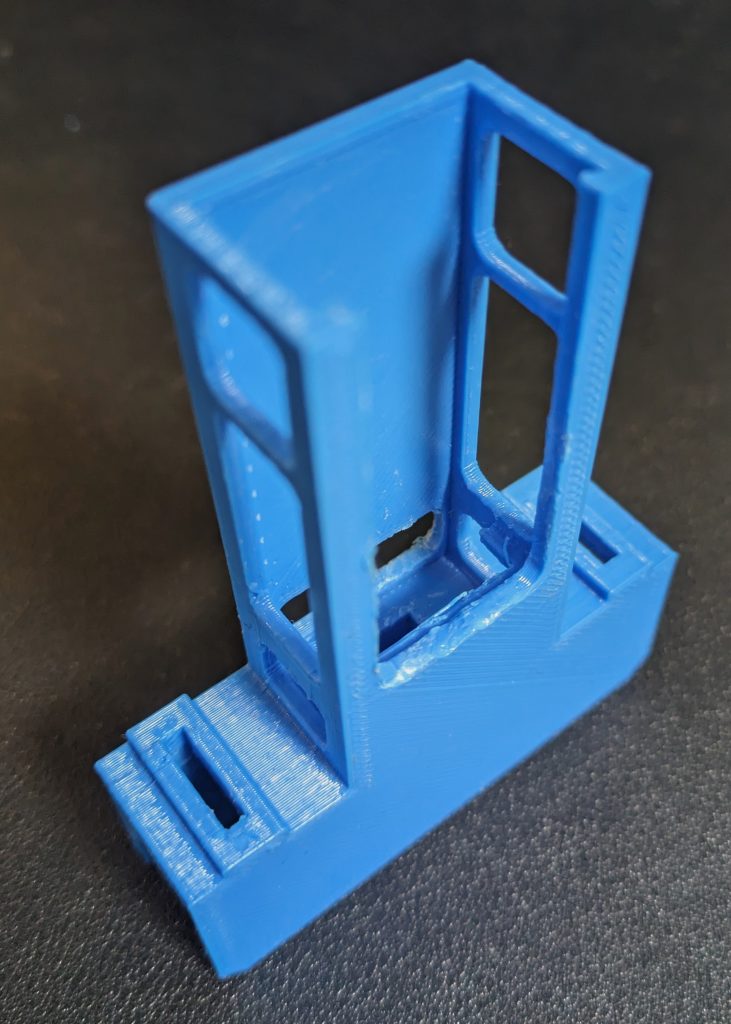
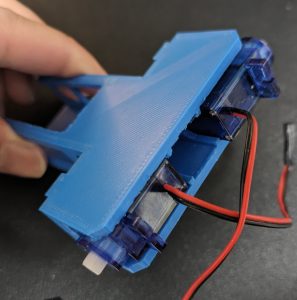
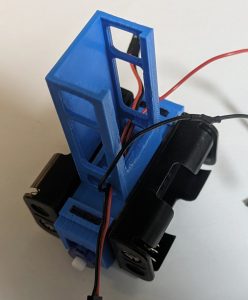
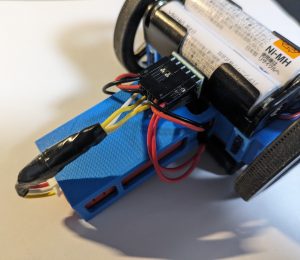
M5StickCを使って倒立振子に挑戦! ~ハードウェア編~ 2024 3/17 M5Stack 2024年3月17日 制御の醍醐味は不安定な系を安定にさせること。今回は、M5StickCを使って倒立振子に挑戦します! 制御工学を学んでいるけど、数式が多くて難しい、何の役に立つのか分からないといった方の助けになればよいと思います。 倒立振子を立たせるのに、かなり試行錯誤しました。どんなところに注意しなければいけないかポイントも紹介していきます。 記事は、ハードウェア設計編、ソフトウエア設計編、実機適合編に分けて連載する予定で、今回はハードウェア設計編です。 目次完成形 </noscript><iframe width="560" height="315" data-src="https://www.youtube.com/embed/pRuTFkPvSBE?si=3BY2uXZ7KuqJuQRO" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share" allowfullscreen class="lazyload" > 部品選定 準備した部品の一覧表です。 準備物個数M5StickC Plus1個FEETECH ギヤードモータ FM902個タイヤ FS90R対応2個DRV8835使用ステッピング&DCモータドライバモジュール1個電池ボックス 単3×2本2個ボディ(3Dプリンタで自作)1個ジャンパピン メス必要分GROVE 4ピンケーブル1本 M5StickC Plus コントローラはM5StickC Plusを使いました。M5StickCPlusは、小型軽量ながら倒立振子に必要なGセンサ、ジャイロセンサーが備わっているので、部品点数削減に繋がります。あとはモーター、タイヤと電源を準備するだけでOK。 私はM5StickCシリーズの中でもM5StickC Plusを使用しました。M5StickC Plus選定は在庫があったからだけです。より安価に作るのであればM5StickCでも問題ないです。 M5StickC Plus ESP32-PICO ミニ IoT 開発キット ネコサン商店 ¥8,402 (2024/03/17 01:52時点 | 楽天市場調べ) Amazon 楽天市場 ポチップ FEETECH ギヤードモータ FM90 マブチモーターより小型なFM90を選定しました。FM90はサーボモーターと同一形状のため、サーボモーター用のタイヤを取り付けることができます。 定格電圧は4.8V。モーター特性は秋月電子のホームページを参照してください。 タイヤ FS90R対応 タイヤはFS90R用を使いました。FM90にも取付可能です。タイヤ径は60mm。 マイクロ連続回転 FS90R サーボ用 2.4インチ ホイール ロボショップ 楽天市場店 ¥421 (2024/03/10 22:10時点 | 楽天市場調べ) Amazon 楽天市場 ポチップ DRV8835使用ステッピング&DCモータドライバモジュール モータードライバは、2ch内蔵のモジュールであるDRV8835を使います。15mm×10mmと小型で、搭載性抜群です。 DRV8835デュアルモータドライバキャリア ロボショップ 楽天市場店 ¥824 (2024/03/10 22:11時点 | 楽天市場調べ) Amazon 楽天市場 ポチップ 電池ボックス 単3×2本 FM90は定格電圧4.8Vのため、充電式単3電池4本使います。重量バランスを考えて、電池2本ずつ前後に搭載することにしたので、2本用を2個用意しました。 配線図 配線図は下図のとおりです。 DRV8835への電源供給のために、単3電池の+端子をDRV8835のVM、VCC端子に繋ぎます。単3電池のー端子は、DRV8835のGNDに繋ぎます。 モーターFM90への接続は、それぞれAOUT1/AOUT2、BOUT1/BOUT2です。モーターは左右で反転して搭載しますので、一方のモーターをプラスマイナス逆転して接続しましょう。 モーターをPWM制御するために、G33端子をAIN1/BIN1、G32端子をAIN2/BIN2に接続しました。 ボディの製作 ボディはFusion360で設計しました。 これを3Dプリンタで製作。一体成型です。3Dプリントの設定はサポート材有り。サポート材を取り除くのにかなり苦労しました。 組み立て モーターは下方から差し込む構造になっています。 電池ボックスを取り付けるためのネジ穴はボディに空けなかったので、両面テープで貼り付けます。配線は中央の穴を通しました。 タイヤをモーターに取り付け。 モータードライバDRV8835は電池パックに両面テープで貼り付けました。DRV8835のヘッダピンにそれぞれの配線を接続。 DRV8835は剥き出しになってしまったので、もう少し見栄えを良くしたかった。 M5StackC Plusをボディに差し込めば完成! これにてハードウェア設計編は終わりです。次回はソフトウェア設計編です。 M5StickC Plus ESP32-PICO ミニ IoT 開発キット ネコサン商店 ¥8,402 (2024/03/17 01:52時点 | 楽天市場調べ) Amazon 楽天市場 ポチップ M5Stack&M5StickCではじめるIoT入門 [ 高馬 宏典 ] 楽天ブックス ¥3,432 (2024/03/10 14:42時点 | 楽天市場調べ) Amazon 楽天市場 ポチップ M5Stack よかったらシェアしてね! URLをコピーしました! 【Raspberry Pi】bluetoothctlを使ってデバイスをBluetooth接続する方法 Arduinoで行列計算!ArduinoEigenの使い方 この記事を書いた人 はちまる 大学で機械工学を学んだ後、製造業で働く40代の会社員です。 IT系、電気系を学んでこなかった機械系人間が、ゲーム制作、電子工作に奮闘してます。 極力低コストでものづくりを楽しむのがモットー。 関連記事 Arduinoで行列計算!ArduinoEigenの使い方 2024年4月1日 【M5Stack】一定周期で実行されるタイマ割り込みを実装しよう 2022年8月17日 M5StickCの取得データをUSBシリアル通信でPCロギング 2022年7月18日 M5Stackで家族に会議中を知らせるディスプレイを制作してみた 2022年6月19日 UDP通信のメッセージをM5Stackで受信する実験をしてみた 2022年5月21日 M5StickCを使って加速度計を作ってみた 2022年5月14日 【M5Stack】画面ちらつきのないデジタル時計を作ろう! 2022年3月24日 ホッチキスで固定できるM5StickC用壁掛けホルダーを3Dプリント 2022年3月20日